How robot hands can use the environment to manipulate objects
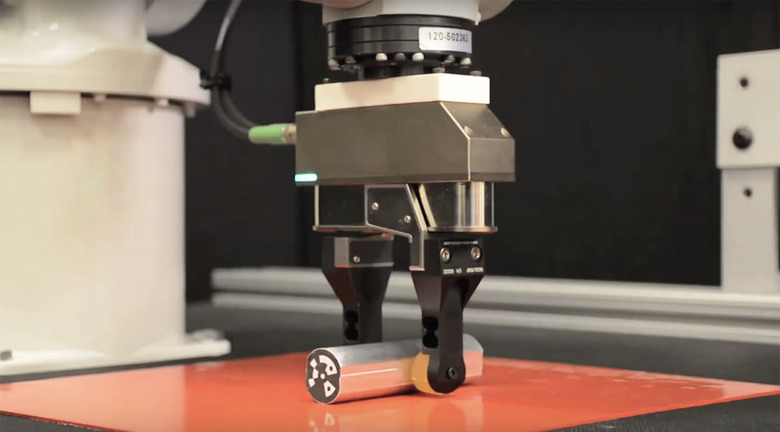
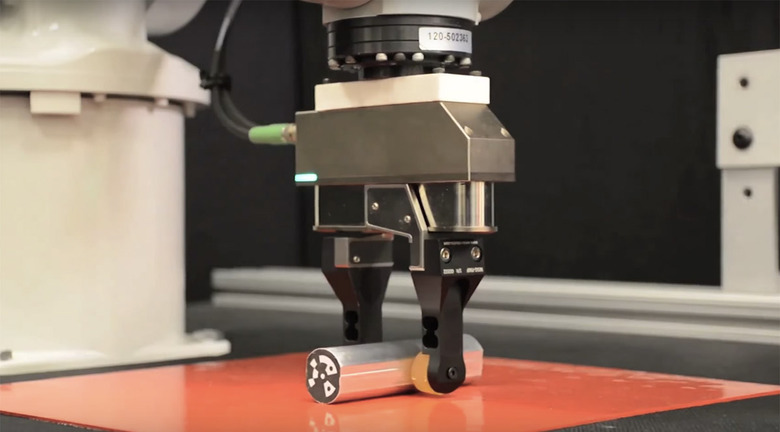
Human hands remain far more dexterous than their mechanical counterparts, but we doubt manufacturers would replace basic pincers with expensive robotic arm technologies. Since it's darn hard and costly to develop or buy a machine that can replicate what the human hand can do, a team of MIT scientists has developed a technique that could give even simple robotic grippers the power to do more complex movements. The approach called "extrinsic dexterity" makes use of walls, furniture or anything else around to help robots perform a particular task. In the video below the fold, for instance, a pincer changes a metallic cylindrical bar's orientation (from horizontal to vertical) by picking it up and tapping it against a wall a couple of times — just watch the clip to see how quickly the whole thing goes down.
In addition, the system can compute for the amount of force a robot needs to exert to accomplish its goal, so the machine can avoid accidentally crushing everything it holds. This is probably a bit too simplistic at this point for institutions developing bionic arms/hands for amputees. But as one of the team's leaders, Alberto Rodriguez, said, this method can be very useful for companies, schools and other organizations that can't afford "a $100,000 hand that is very complex to use." Rodriguez and his team are now exploring the idea further, hoping to find a way for basic grippers to make use of flat surfaces like tabletops to roll objects.