Drone equipped with Google's 3D-sensing phone won't be deterred
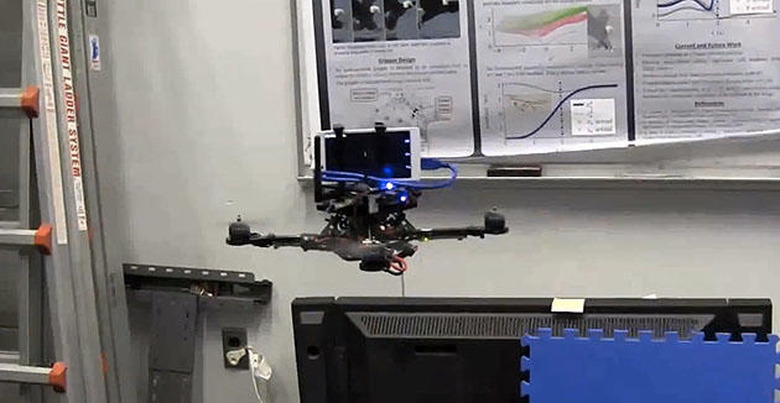
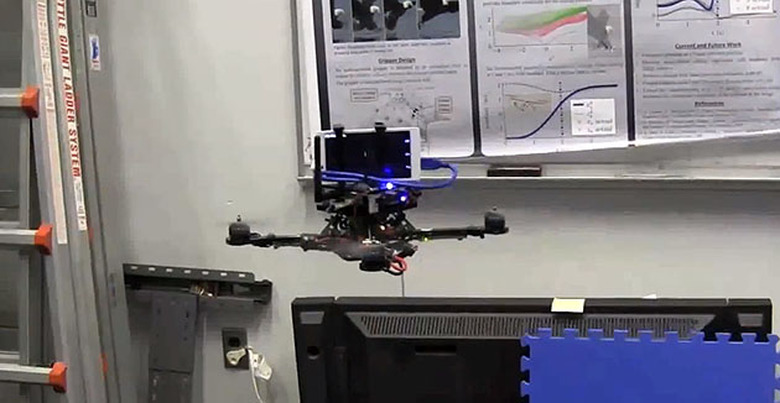
Google wants to put its Project Tango handsets in orbit, but researchers from the GRASP Lab at UPenn are keeping things on the down-low with one of their already-clever quadrotors. If you'll recall, Tango has a depth sensor, motion tracking camera and two Movidius vision processors to create an internal 3D map of its surroundings. That should, in theory, keep the drone aligned with pinpoint accuracy and no GPS signal. Judging by the video below, it worked perfectly — the quadrotor stuck to a fixed point and pre-programmed flight path despite some healthy shoves. That should help future autonomous drones react better to their environment if we decide to send them out for, say, delivery duty.