This golf robot uses a Microsoft Kinect camera and a neural network to line up putts
It doesn't get the ball in the hole every time, but at least it won't whine about its 401k.
We may receive a commission on purchases made from links.
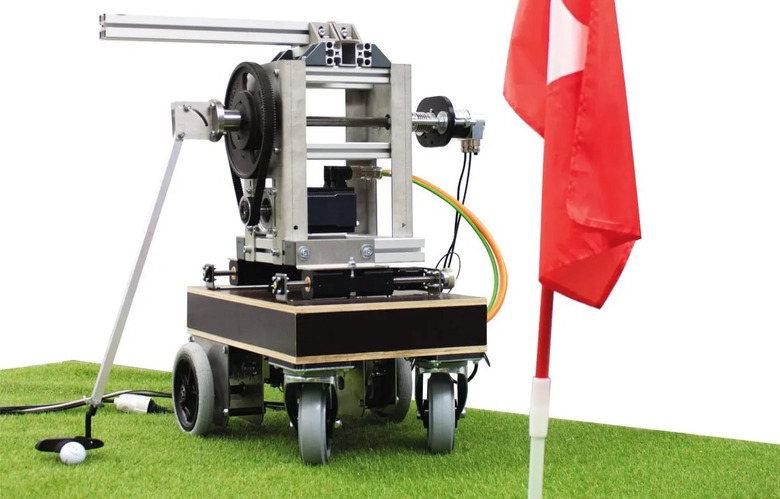
Robots that can whack a golf ball down a fairway aren't exactly new, but building one that can play the nuanced short game is a more complex problem. Researchers at Paderborn University in Germany have done just that with Golfi, a machine that uses a neural network to figure out how to line up a putt and how hard to hit the ball to get it into the hole from anywhere on the green.
The robot takes a snapshot of the green with a Microsoft Kinect 3D camera and it simulates thousands of random shots taken from different positions. It takes factors like the turf's rolling resistance, the ball's weight and the starting velocity into account. Paderborn doctoral student Annika Junker told IEEE Research that training Golfi on simulated golf shots takes five minutes, compared with 30-40 hours were the team to feed data from real-life shots into the system.
Once Golfi has figured out the shot it should take, it rolls over to the ball and uses a belt-driven gear shaft with a putter attached to make the putt. The robot doesn't get the ball in the hole every time, though. Junker said the robot nailed the shot around 60-70 percent of the time. That's still a better accuracy rate than most amateur golfers and at least you won't see Golfi fly off the handle like Happy Gilmore if it misses.
However, Golfi sometimes drove over the ball and moved it out of position. The researchers have only tested the robot in the lab, so real-world conditions, like greens with divots or steep slopes, may pose problems for a system that relies on a bird's-eye view.
In any case, the researchers didn't set out to build a robot capable of competing with PGA Tour pros. They hope that the techniques they used in Golfi could be used for other robotics applications. "You can also transfer that to other problems, where you have some knowledge about the system and could model parts of it to obtain some data, but you can't model everything," Niklas Fittkau, another Paderborn University doctoral student and co-lead author of a paper on Golfi, told IEEE Research.
Back in 2016, a different robot called LDRIC sank a hole-in-one at a PGA event (albeit on the fifth attempt). I wonder who footed the bill for a round of drinks at the clubhouse afterward.