A new age of transportation is upon us and it's self-driving


We're on the cusp of change: Self-driving cars have begun to hit the streets with the goal of making transportation safer. The dream of a self-driving-car future, it would seem, is becoming a reality and it's been a long time in the making. A steady flow of engineers have, over the years, successfully chipped away at the problem of autonomous vehicles as the requisite technology's shrunk in scale and grown in capability. So what better time to look back at some milestones in autonomous-vehicle development than in the wake of this new age of transportation?
The American Wonder
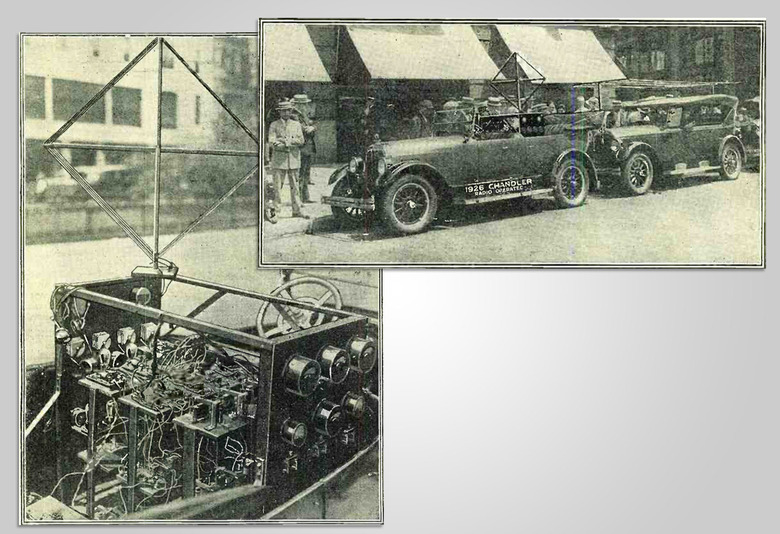
In August of 1925, Francis P. Houdina borrowed a trick from Nicola Tesla when he began touring the US to show off his radio-controlled automobile. The car was called the American Wonder and its demo in NYC was a bumpy one. The "driver" was in a follow-along vehicle using radio waves to control the Wonder's steering wheel, clutch, brake, gears and horn. Safety wasn't its strong suit though. At one point, its imperfect operation sent it into a nearby vehicle full of cameramen. Houdina, however, continued touring the US for several years, displaying the technology.
*The car has mistakenly been called the Linrrican Wonder due to mis-translated text from a Times article that year.
Highway of tomorrow
At the 1939 World's Fair, GM presented its "Highways & Horizon's" exhibit, showing the futuristic world of the 1960s. Automatic highways were teased, with radio control towers and cars driving in walled lanes for safety.
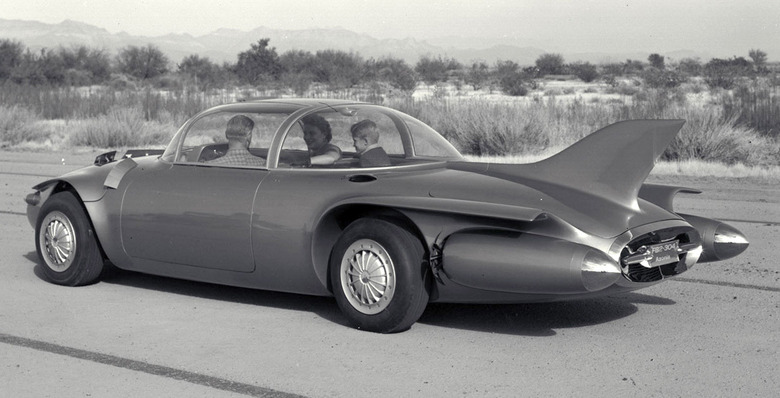
The 1956 Firebird II concept was the first of GM's attempts to make good on its vision of auto safety and automated guidance systems. By the time the Firebird III concept was unveiled in 1958, both RCA and GM had done real-world tests of automated highways. In GM's case, it used buried cables to send electronic impulses to onboard receivers.
Navigational smarts
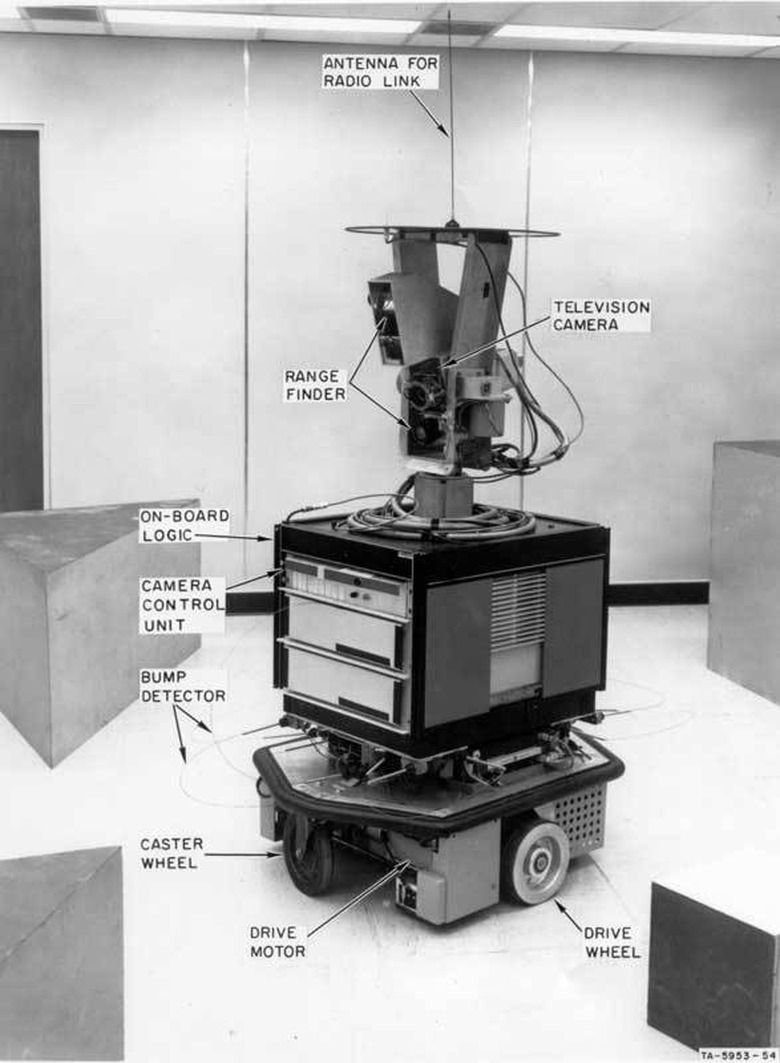
In 1966, the team at Stanford Research Institute's (SRI) Artificial Intelligence Center (AIC) began developing a machine called Shakey that could navigate real-world environments. Although it stayed off the roads and remained indoors, the sensors and software were pioneering milestones in autonomous navigation.
Camera-based cruising
In 1977, a team from Japan's Tsukuba Engineering Research Lab developed one of the first autonomous cars that used cameras to detect white street markers and navigate the roads rather than follow embedded impulses.
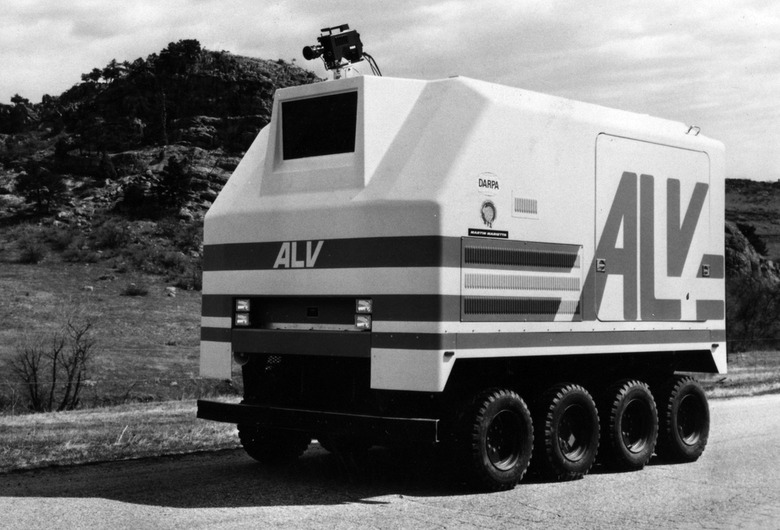
In 1983, a DARPA project under the umbrella moniker of Strategic Computing included an autonomous systems study called the Automated Land Vehicle (ALV). It was an early military land "drone" that strived for full autonomy, using cameras to detect terrain, and then computing navigational solutions.
Dynamic vision

Professor Ernst Dickmanns of the Universitat der Bundeswehr Munchen began working on "dynamic [computer] vision" and autonomous vehicles in the '70s and '80s. With funding from the EUREKA Prometheus project (a European R&D effort aimed at road safety) he and his team developed several experimental vehicles.
Their first breakthrough success was the VaMP project launched in 1993/94. It was a converted Mercedes 500 SEL (Mercedes-Benz was a project partner) equipped with cameras and other sensors to detect and react to the surrounding environs in real time. It successfully and autonomously navigated 1,000 km (621 miles) of highway in regular traffic with the system.
Affordable retrofitting
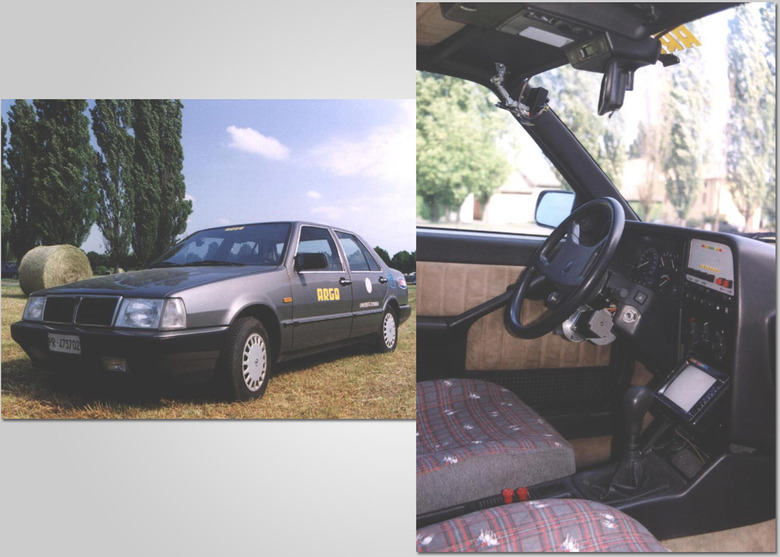
The ARGO project developed by the University of Parma and the University and Pavia in Italy also arose from EUREKA Prometheus funding. This vehicle, like many before it, used stereo vision; cameras detected the surroundings and computed navigational solutions.
In 1998, it successfully achieved a 2,000 km (1,243 mile) journey called the "MilleMiglia in Automatico." Its low-cost hardware and camera-based system proved that affordable designs using only visual input could work in real-world conditions.
DARPA's Grand Challenges

DARPA first conducted its Grand Challenge for self-driving vehicles back in 2004. That year, no teams successfully finished its Mojave Desert course. But in 2005, the Stanford Racing Team's VW Touareg named Stanley won. This vehicle carried more than just cameras: It included laser rangefinders, radar for long-range sight, GPS sensors and several Pentium M motherboards in a rugged rack mount.
City driving

Three years after the first Grand Challenge, DARPA moved from the desert to an urban environment. Stanford racing came in second this time, with Tartan Racing earning first place. Carnegie Mellon University (of Navlab fame) was behind the winning team, along with support from GM, Continental, Caterpillar and more.
The vehicles were tasked with operating autonomously throughout the entire course, dealing with other cars, signals, obstacles and merging with traffic as a human driver would.
Searching the streets

In 2009, Google, which had backed other vehicles in the DARPA challenges, launched its own autonomous research project. These cars, including a Toyota Prius, hit the streets throughout the Pacific Coast, logging over 140,000 miles by 2010. They were supported by engineers — many plucked from the 2005 and 2007 DARPA Challenge-winning teams — and used video, radar and lasers for navigating autonomously. Big things were planned...
Intercontinental challenge

In 2010, the VisLab team — which helped outfit the ARGO vehicle with its camera system — embarked on an intercontinental autonomous challenge. Four self-driving vehicles crossed nine countries from Parma, Italy to Shanghai, China facing numerous everyday driving conditions over its 13,000 km (8,078-mile) course. All onboard navigational systems were solar powered, exhibiting a truly sustainable add-on to existing vehicles.
Smart shuttle

A French robotics company called Induct developed the Navia shuttle, a vehicle more in tune with self-driven runs through campuses and parks than highways. These vehicles learn proscribed routes and scan for obstacles using LIDAR sensors, while moving along at speeds up to 13MPH.
The UK has been testing a rebrand of Induct's vehicle, which it's calling Meridian. It's part of a government-sponsored initiative looking at driverless car projects, similar to the RRL's years before.
Cute conveyance

In 2014, Google unveiled the plans for a bubbly little self-driving vehicle of its own design. By 2015, the first working prototype arrived and was ready for test drives. Prospective passengers would have to sit back and hopefully enjoy the ride as there's no steering wheel included in the design.
Car of the future, today

The next phase in autonomous-vehicle evolution is being tested by a host of auto manufacturers these days. This year, we've seen what could be our commuting future with the Mercedes-Benz F 015 concept. The interior is decked out with displays and eschews the classic forward-facing seats for rotatable chairs in its luxurious, yet productivity-minded design.