'Soft' robotic hand runs on air pressure and AI
A demo shows the bot learning how to roll a 12-sided shape with its fingers.
We've seen examples of robots mimicking humans, but now we're seeing robots that can autonomously teach themselves how to handle objects. Festo has developed a flexible robotic hand that uses artificial intelligence to deduce how to manipulate an item with its fingers. Such self-learning technology should prove vital towards building robots that can learn to execute tasks by themselves in the workplace, at home and pretty much anywhere.
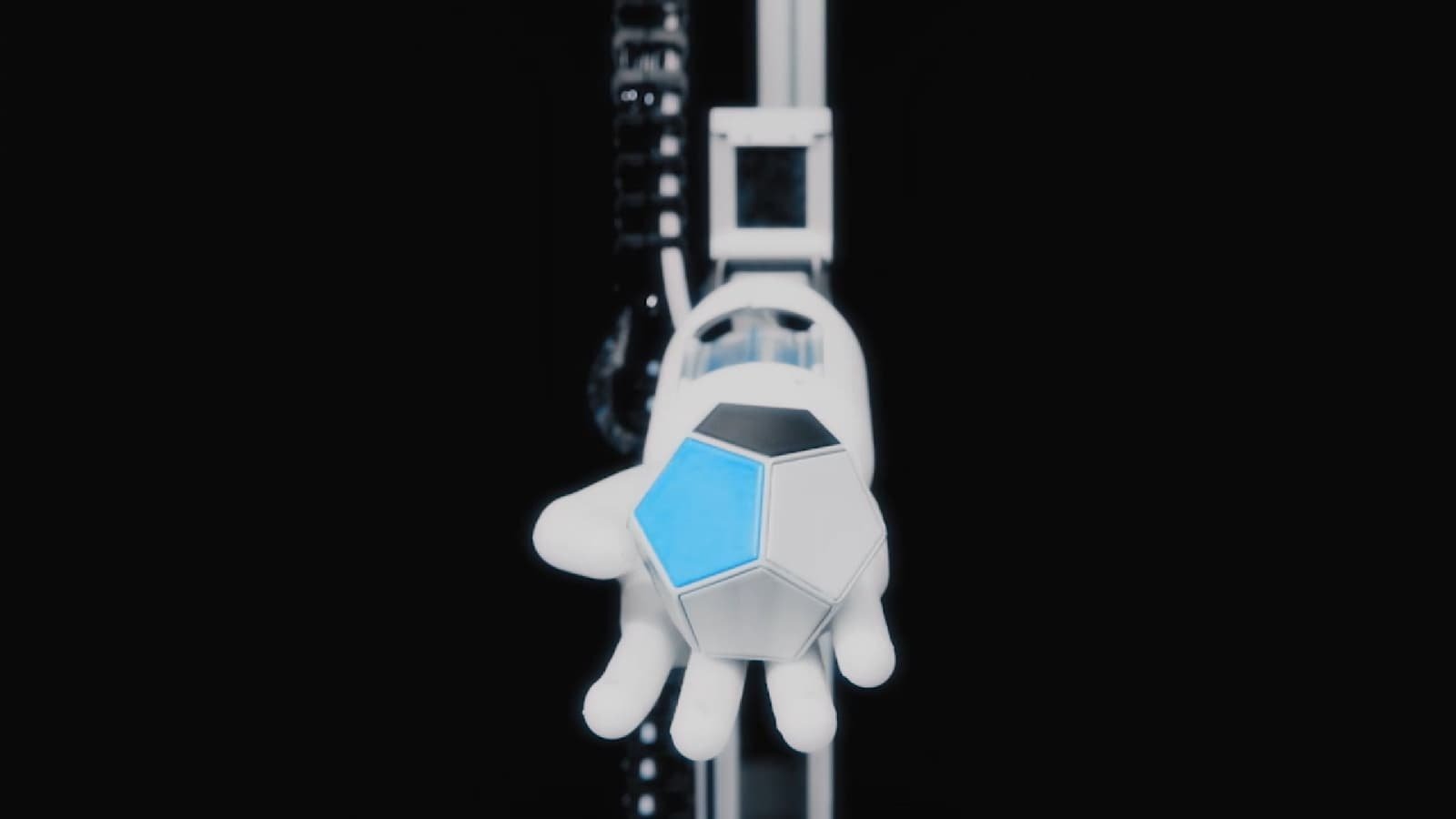
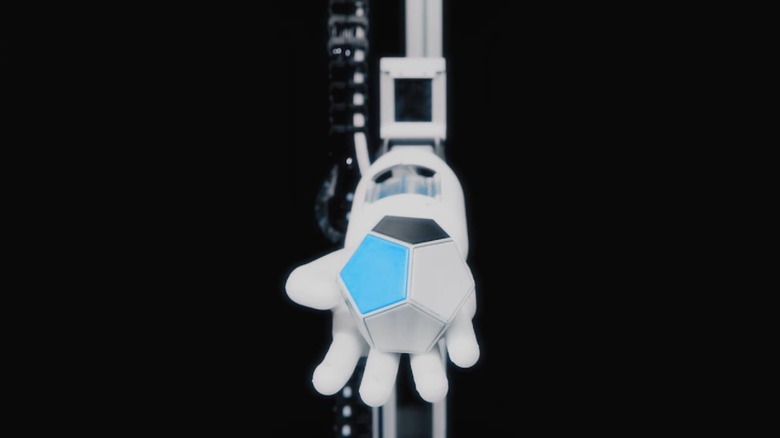
The BionicSoftHand determines how to perform tasks through trial and error, but without a tedious, time-sapping manual process. Once engineers give the robot an objective, 3D cameras and depth sensors create a virtual copy of an object. The hand's AI then runs myriad simulations to help it quickly figure out what to do. In a demo video, the robot determines how to roll a dodecahedron between its fingers without dropping it. Without AI, it could take months for the robot to learn how to do so.
AI is only one part of the project. The robot has a soft hand, which means it can interact safely with humans.
The fingers are made from 3D textile-knitted fabric (using elastic and high-strength fibers), with tactile sensors and a flexible circuit board. There are bellows inside to move the joints as they fill and empty with air. Pneumatic swivels at the base of the thumb and index fingers allow them to move from side to side, while there are two dozen proportional piezo valves in what's essentially the wrist to make the whole thing work. Festo says the construction of the hand allows it to have 12 degrees of freedom, allowing it to manipulate objects with dexterity.
We're likely a while away from seeing this tech in factories and classrooms. Machine learning means it will improve over time and, as both AI and the hardware advances, robots like BionicSoftHand should figure out how to handle even more nimble tasks with autonomy.