MIT researchers create AI system that could make robots better at handling objects
The system can manipulate more than 2,000 objects.
When most of us pick up an object, we don't have to think about how to orient it in our hand. It's something that comes naturally to us as we learn to navigate the world. That's something that allows young children to be more deft with their hands than even the most advanced robots available today.
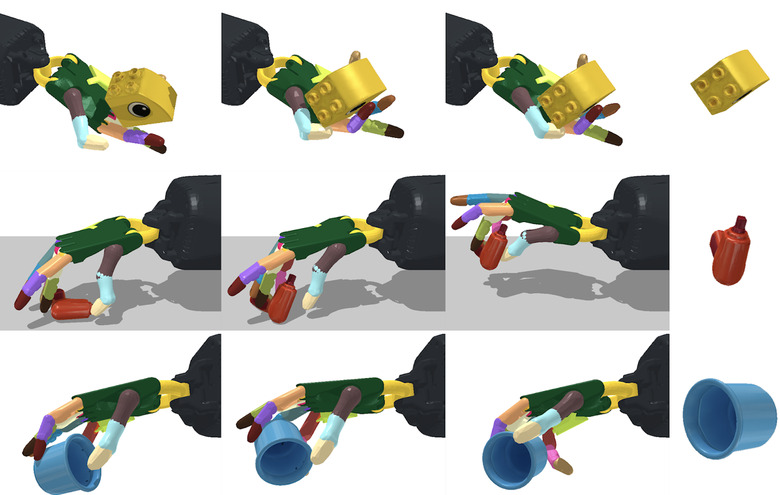
But that could quickly change. A team of scientists from MIT's Computer Science and Artificial Intelligence Laboratory has developed a system that could one day give robots that same kind of dexterity. Using a model-free reinforcement AI algorithm, they created a simulated, anthropomorphic hand that could manipulate more than 2,000 objects. What's more, the system didn't need to know what it was about to pick up to find a way to move it around in its hand.
The system isn't ready for real-world use just yet. To start, the team needs to transfer it to an actual robot. That might not be as much of a roadblock as you might think. At the start of the year, we saw researchers from Zhejiang University and the University of Edinburgh successfully transfer an AI reinforcement approach to their robot dog Jueying. The system allowed the robot to learn how to walk and recover from falls on its own.
As things stand, the system isn't perfect either. It can reorient many smaller objects, including things like tennis balls and apples, with a nearly 100 percent success rate, but tools like screwdrivers and scissors present a challenge. When it comes to those types of objects, its success rate falls closer to 30 percent. Still, the potential of the system is huge. It could one day make robots better at manipulating tools and make them much more efficient at tasks like packing boxes.