MIT project generates custom robots to navigate different terrains
The computer identifies shapes that humans wouldn’t adopt.
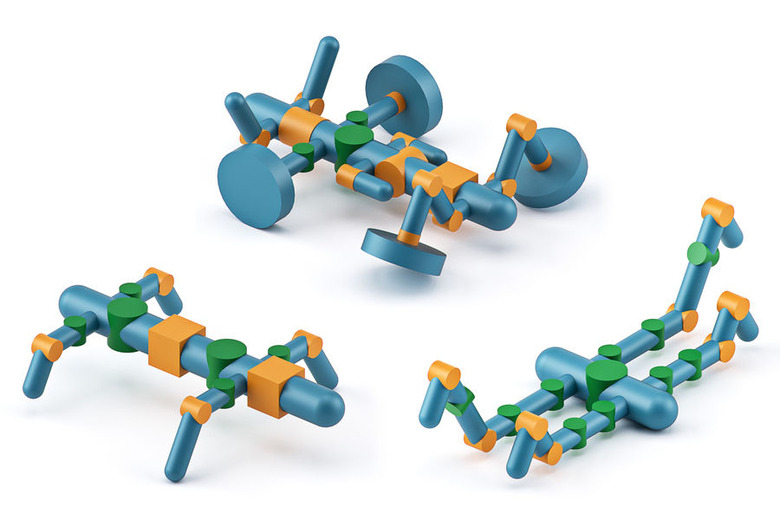
Researchers at MIT have developed a way for a computer to essentially design its own robotic body, based on the available parts and the local terrain. Dubbed RoboGrammar, the system knows what obstacles it'll need to cover and what equipment is available, and work everything else out from there. The paper's lead author, Allan Zhao, told MIT News said that despite the variety of tasks robots are used for, their designs tend to be "all very similar in their shape or design."
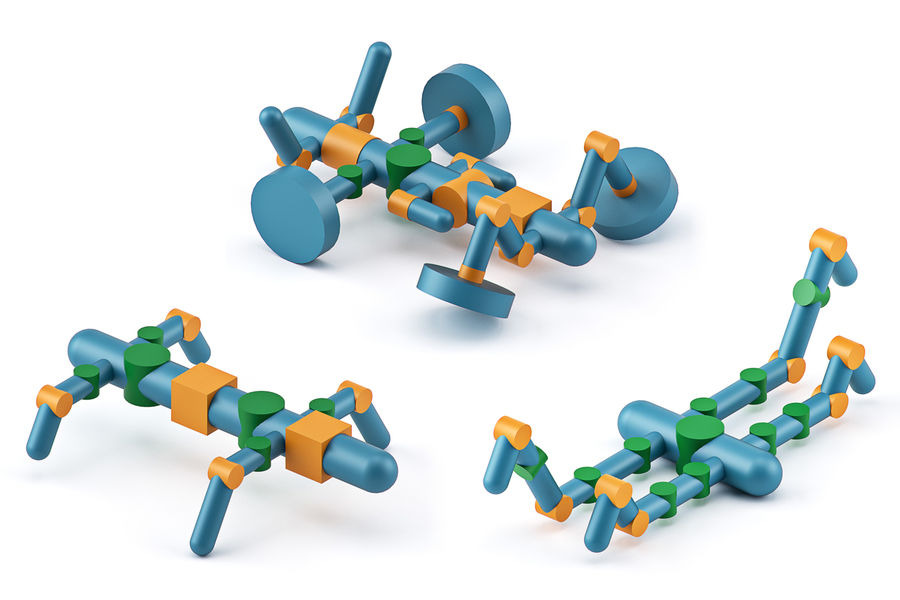
Robots are frequently designed to mimic people, animals (with four legs) or vehicles, with wheels and tracks to move around. But that may not be the most useful or efficient form, which is why RoboGrammar's only limitation is the practical limits around building robots. For instance, in one simulation where the terrain was rough with lots of slaloms, the best design looks more like a crocodile than anything else. The robot is then put into a simulation of the terrain to ensure it operates in a way that makes sense.
Naturally, the system isn't yet ready to enable computers to design their own robots without any human input. But this stands as an interesting first step on the road to being able to make devices that are better suited to their environments, and more efficient, than we can currently dream up. The team's next step is to actually build some of the robots the system has cooked up to see if the simulation's promise matches the reality. Zhao added that the system could benefit engineers as well as the designers of procedurally-generated video games that need to build populated environments quickly and efficiently.