MIT researchers create robotic gripper that can untangle thin cables
It could one day help with household tasks.
Researchers at MIT's Computer Science and Artificial Intelligence Laboratory have developed a robotic gripper with the dexterity to handle thin objects like ropes and cables, the university announced. The technology could one day be used by robots to perform household tasks such as folding clothes, or for more technical purposes like wire shaping.
Humans can find it challenging to manipulate thin flexible objects, and doing so can be "nearly impossible" for robots, MIT spokeswoman Rachel Gordon said in an email. The standard approach had been for robots to use "a series of slow and incremental deformations," plus mechanical fixtures, to handle these objects.
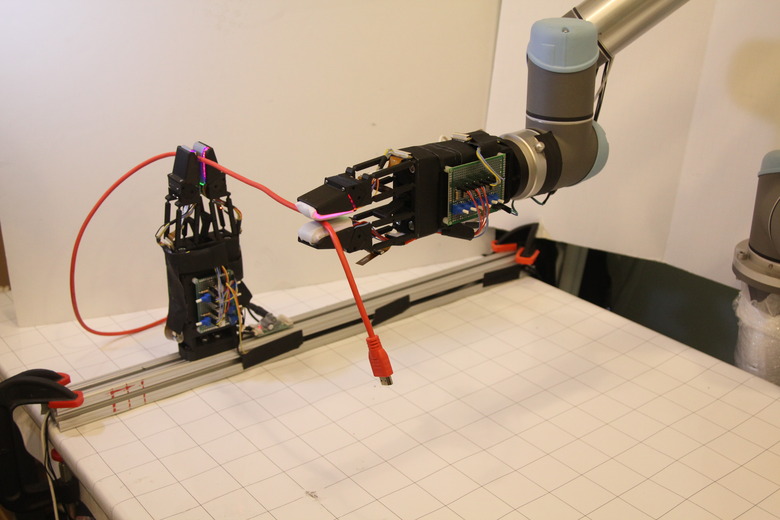
MIT researchers approached the problem from a different angle, building a two-fingered gripper that's meant to more closely resemble human fingers. The fingers are outfitted with high resolution tactile sensors, known as "GelSight" sensors, made of soft rubber with embedded cameras and mounted on a movable robot arm. The system has two controllers: one that modulates grip strength, and one that adjusts the gripper's pose to keep the cable within the gripper.
It's difficult for robots to manipulate cables, Gordon said, because the task requires the robot to enable smooth sliding while also preventing the cable from falling from the robot's fingers. MIT's robot was able to reliably perform a few tasks, including finding the end of an earbud cable and plugging it in.
However, there's still a bit of work to go before the robot is ready to handle all of our USB cables. The robot had difficulty pulling a cable back when it reached the end of a finger, which researchers attribute to the outwardly curved surface of the GelSight sensor. They're working to adjust the finger-sensor shape to improve the robot's performance.