Here's updated mapping vehicle paves way for self-driving cars
True collection vehicle v3.0 is all about high-definition mapping.

It may have been a while since we last we came across a Here 3D mapping vehicle, but that's not to say the company hasn't been using its cars lately. In fact, the Here True collection vehicle is now in its third revision, and I got to hop on one — based on a Volkswagen Golf Variant 280 TSI Highline — during Computex. The ride features much faster D-GPS tracking that no longer requires a half-hour calibration (to reach an accuracy of under one meter), along with a Velodyne LiDAR with an accuracy of better than 2cm (within a range of up to 70 meters) and four 16.2-megapixel MARS panoramic cameras. This set of gear is almost identical to what we've seen before, so the real highlight this time is the updated backend to support high-definition mapping.
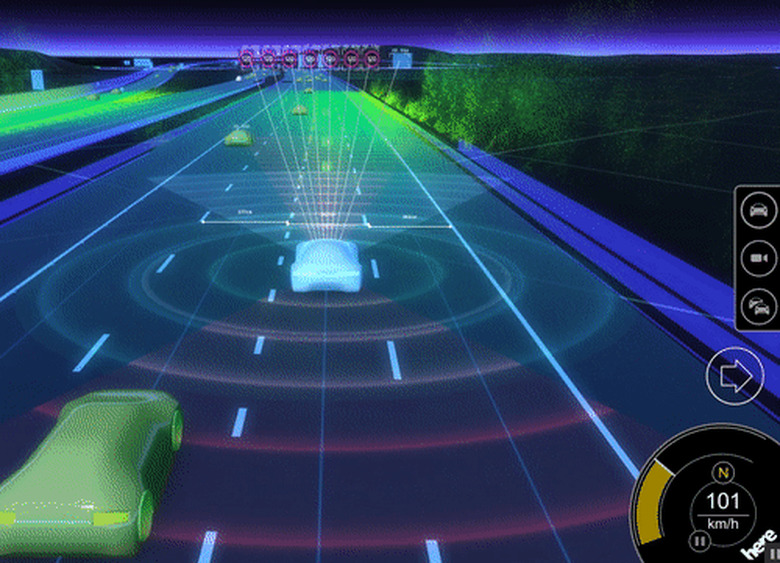
For HD mapping, Here's fleet is currently involved in over 20 projects worldwide and covering over 48,200 km per week, with each collection vehicle contributing around 500 km or over 1TB worth of data. The hard drives are then sent off for data processing, quality assurance plus final 3D modeling. With this 3D spatial data, future self-driving cars will not only be able to navigate around better, but they will also know the curvature and elevation of the roads, which can already help improve engine efficiency and Advanced Driver Assistance Systems (ADAS) well before autonomous driving goes mainstream.
Unfortunately, I wasn't able to see a live demo of Here's HD mapping due to heavy rain. This was partly to do with the higher brightness requirement for HD mapping, and precipitation does affect LiDAR performance unless special algorithm is applied. I did, however, get to sit inside the collection vehicle to get a feel of how the driver would operate the mapping system: The computer was housed in the legroom of the front passenger seat, and it was linked to the sensors at the top via three cables sticking out of the car door — hence the rainwater leak, though both the driver and the demonstrator seemed unfazed. Positioned beside the driver was a Windows tablet which was running the mapping system's interface. The driver would use it for navigation as well as checking the cameras, LiDAR, GPS and hard drive.
Here envisions a future where any car or even drone equipped with similar sensors can contribute to a "reality index" on the go, which would allow us to search for ground, air and ultimately atmospheric data that are indexed in time. One potential smart city use case here is before deploying fire trucks to a site, the station can send off drones to survey the site and potential routes, and then it can use real-time 3D data from the drones plus cars in the area to adjust traffic light behavior, in order to optimize the route for the fire trucks. Another concept involves using this 3D data from cars to spot vacant street parking spots, though this will need a certain volume of properly-equipped cars to make this service viable.
This is obviously a long way to go, but the Here reps say the European countries — Germany, in particular — are well ahead of the game, and the firm is determined to help them put our feet, hands and eyes off the car in the very near future. So whether you like it or not, Here has already transitioned from a company that was helping drivers to one that's now helping to get rid of drivers.
Click here to catch up on the latest news from Computex 2017!