An algorithm customizes exoskeletons to fit a person's needs
It could also help with more complex exoskeleton programming in the future.
Scientists have been studying exoskeletons in nature for years, and they've been trying to figure out how to adapt them for human use. After all, a powered exoskeleton could change the lives of people who have mobility issues, whether due to age, injury or disease. The problem is that exoskeletons aren't one size fits all. Adapting them to individual humans is a difficult and time-consuming process. But now, researchers at Carnegie Mellon University may have found a way to make it a whole lot easier.
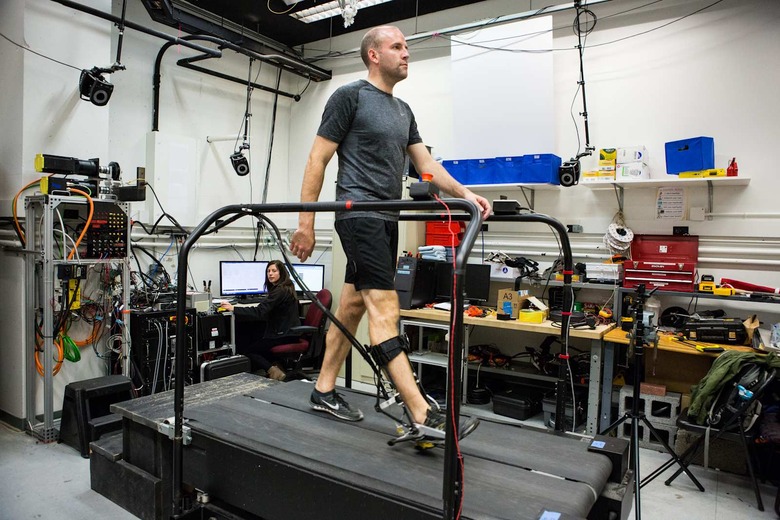
The team used a leg exoskeleton, which covered from the upper calf to the toes, for their experiment. Rather than calibrate the device once and use it on all the participants, though, the researchers had the participants walk on a treadmill while the powered exoskeleton helped. The aim was for the device to remove some of the effort it took to walk.
An algorithm took stock of how participants walked using the exoskeleton and adjusted four different parameters on the device to compensate for individual walking habits. They recorded the participants' metabolic exertion, or how hard they were working in order to walk, during the entire process. They called this process "human-in-the-loop optimization" and were able to cut participant energy usage up to 40 percent.
Not only is this genetic algorithm important for creating exoskeletons that can fit a wider number of people, but it also hints that we may be able to create more complex assistive devices. The responsiveness of this algorithm to continually changing conditions (walking on a treadmill) could be applied to many different types of exoskeletons, including ones related to increasing speed, endurance and balance.