Watch this biped robot endure kicks and a barrage of dodgeballs

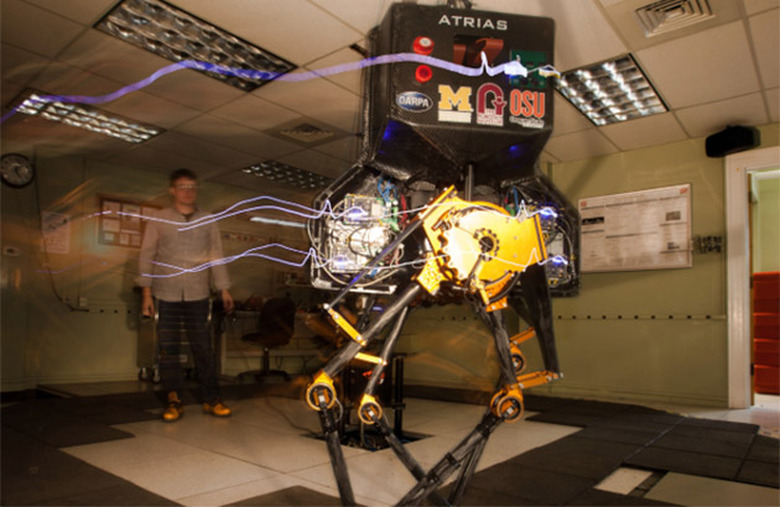
For a biped robot to be able to do its job, it needs to be stable — it can't topple at the gentlest touch or gust of wind. That's why Oregon State University's Dynamic Robotics Laboratory designed its prototype robot called ATRIAS to be extra stable, as you'll see in the videos below the fold. It easily neutralized human kicks during one test in early March, and it barely even registered that it was being pelted with dodgeballs on another test just a few days ago. Don't let those spindly legs above fool you either: those springy, pogo-like carbon fiber limbs are the reason why the robot's such an agile runner. ATRIAS is scheduled to demonstrate its skills onstage at the DARPA Robotics Challenge finale in June. Despite its ability to withstand abuse, its developers still have a lot to do before it can walk and run around the stage while maneuvering over obstacles for its performance.