NASA's origami robots can squeeze into places rovers can't
They could be used to explore the parts of Mars a full-sized rover can't reach.

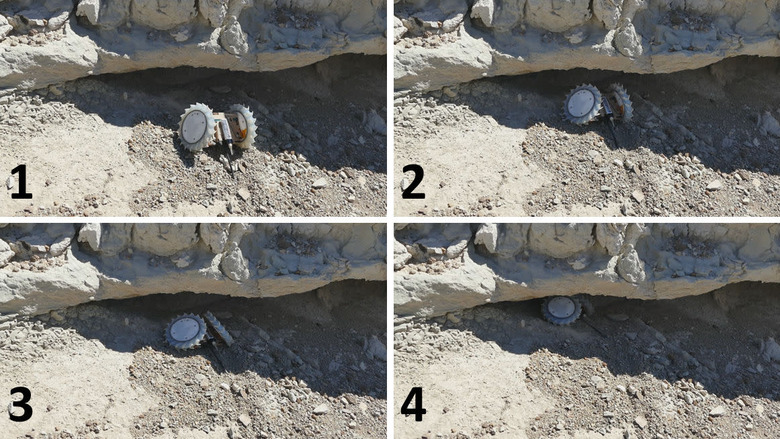
Imagine a Martian rover that can send small robotic minions to crawl into crevices or climb steep slopes — everywhere a full-sized vehicle can't go to. That's the scenario a team from NASA's Jet Propulsion Laboratory hopes to achieve by developing small origami-inspired robots called Pop-Up Flat Folding Explorer Robots or PUFFERs. They're made of printed circuit boards and can be flattened and stacked on top of each other on the way to their mission. Once they get to the location, they can pop back up and drive away.
PUFFER's project manager Jaakko Karras conjured up its design back when he was experimenting with origami while working on robots at UC Berkeley's Biomimetic Millisystem Lab. The team replaced the paper he used in his design with printed circuit boards and then 3D printed wheels for the machine. PUFFER's latest set of wheels have treads and can inch forward one wheel at a time, so it can climb slopes. They can also fold over the robot's body if it needs to squeeze into a tiny opening.
While the current prototype can already drive up to 2,050 feet on one charge and withstand extremely high temperatures, the team has more plans for the machine. They want to equip it with scientific instruments, which could make it as big as a breadbox. In addition, if it's to explore Mars and other celestial bodies, it has to be autonomous and not a machine controlled remotely via Bluetooth.
Karras said PUFFERs "can do parallel science with a rover, so you can increase the amount you're doing in a day." Kalind Carpenter, who made the robot's wheels, added: "If Curiosity had a stack of PUFFERs on board, each of them could go to separate spots, and the rover would just go to the most interesting one."