Algorithms help robot dogs trot more like real animals
They mimic the natural balance of vertebrates.
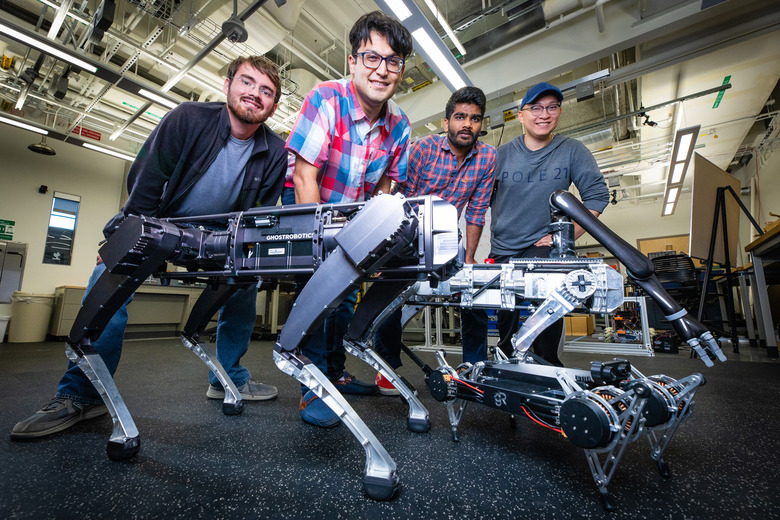
Robot dogs can move efficiently, but not all that naturally — and no, twerking doesn't count. Virginia Tech researchers think they can do better. They're developing a combination of algorithms and sensors that help robots move with gaits more like those of real animals. The system mimics the behavior of vertebrates, whose balance control comes largely from oscillating neurons in the spinal cord, using a combination of encoder sensors (to read relative positions for joints) and inertial measurement units (to measure the body's orientation relative to the ground). The result is a mechanical canine that can walk, run and trot with more grace and speed than usual.
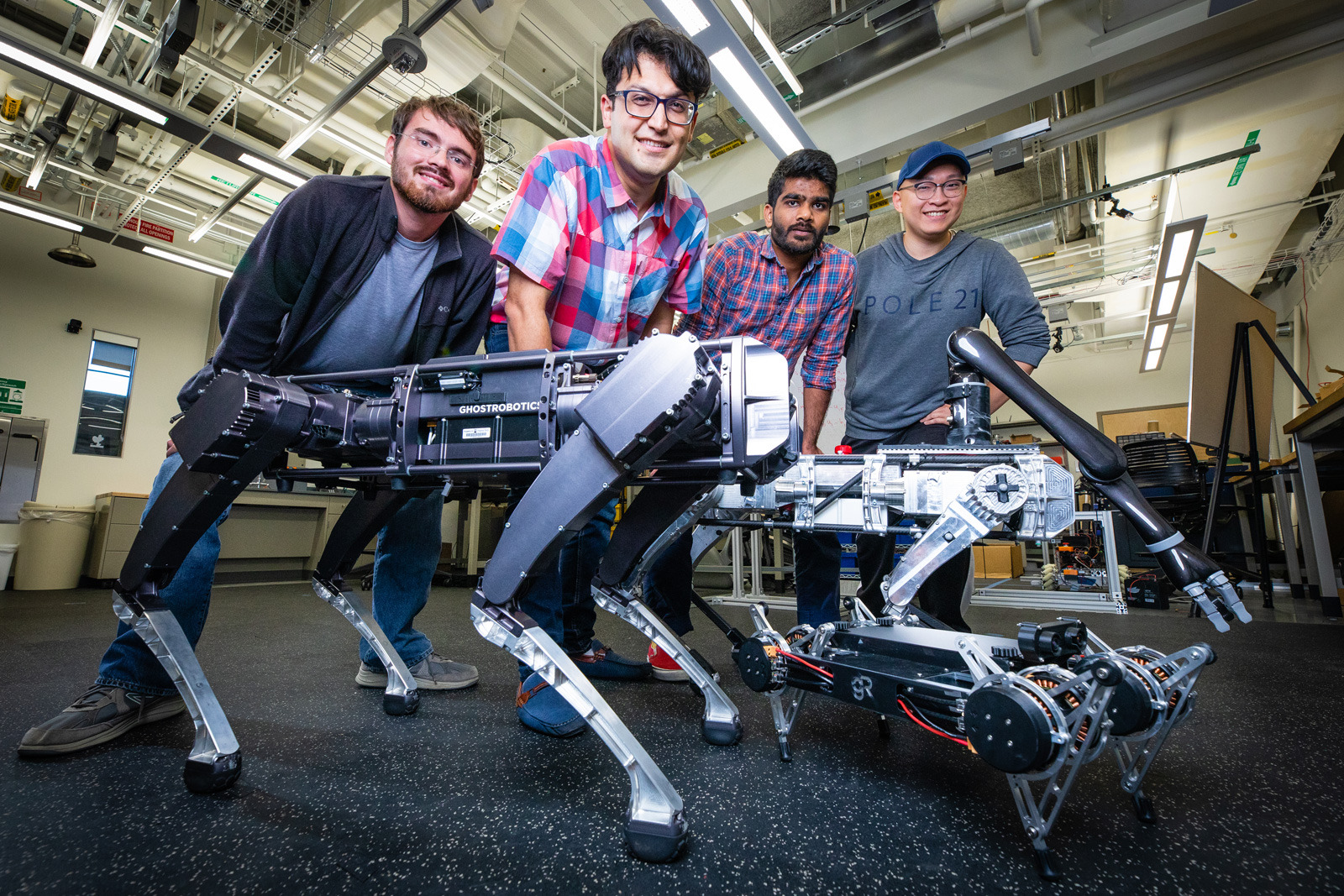
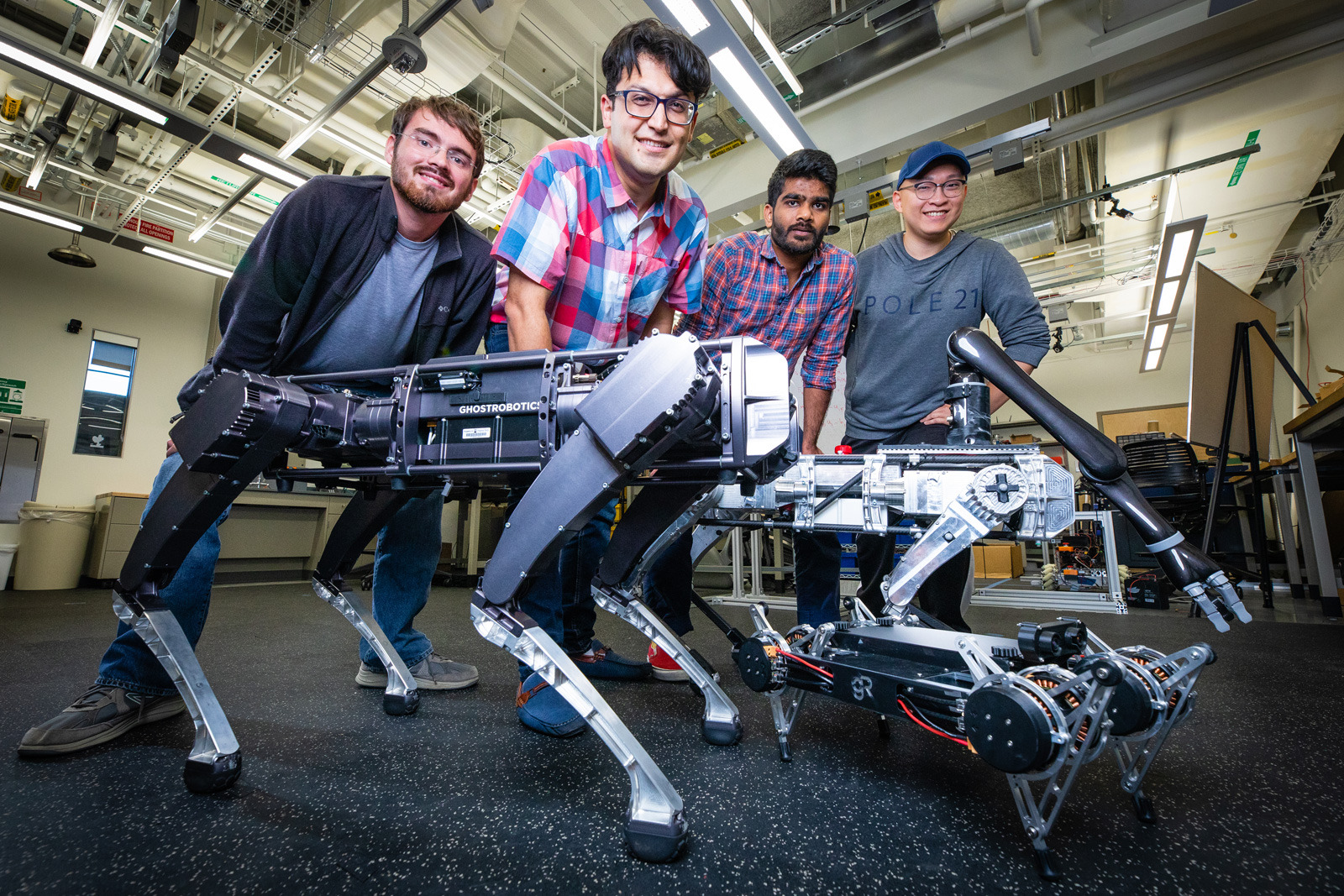
Cameras and LiDAR are also present to help robots avoid collisions. This doesn't require dramatic changes to the bots themselves, at least. The test units are Ghost Robotics designs augmented with sensors to test the new algorithms.
The initial work has proven fruitful, but there's a lot of work left before you could see this in robots beyond the lab. Assistant professor and key researcher Kaveh Hamed also stressed that it wasn't just about making the algorithms more effective — they also have to be genuinely "bio-inspired." As such, it could be a while before there's a pet robot that moves just as smoothly as the real thing.