Microrobots use the power of bacteria to avoid obstacles
The tiny machines can detect and move around objects on their own.
We don't need to scale down Google's self-driving system to make microrobots that can swim in fluid while avoiding obstacles. Drexel University professor MinJun Kim and his team of engineers have discovered how to use bacteria to do so. See, Serratia marcescens, the flagellated microorganism commonly associated with urinary tract and respiratory infections, carries a negative charge. If you smear that on a tiny chip, you get a negatively charged microrobot that can stay afloat (thanks to the bacteria's flagella) and swim around by riding electric fields applied to its environment.
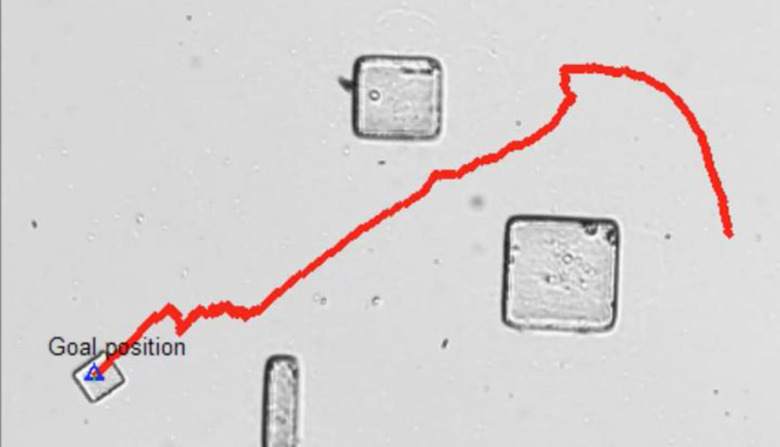
Kim devised that method way back in 2014. For this new study, the team has created an algorithm that gives the tiny machines the power to detect and avoid any distortions in the electric field on their own. These distortions can typically be found near the corners of other objects in the fluid. By circumventing them, the robot is also avoiding anything that can block its path. The professor explains that this level of "autonomy is an important step" if we want to use micromachines for targeted drug delivery or to build microstructures.
Kim, of course, isn't done exploring the potential of bacteria-powered microrobots. Now that this particular study is done, he's planning on creating a system of micromachines that can manipulate live cells in the lab. Among other things, that system could be used to control the growth of stem cells for research and medical purposes.