0
Windows 11 sucks slightly less now, thanks to a June update
The update brings a low-latency profile, speeds up search, and patches hundreds of flaws.
Read More
The update brings a low-latency profile, speeds up search, and patches hundreds of flaws.
Read MoreThe regulation also imposes new safety expectations on 'AI chatbot services.'
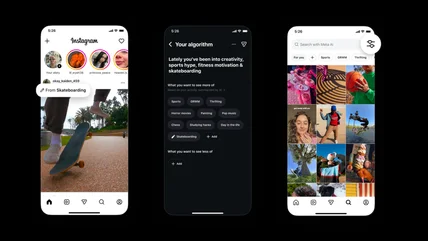
Read MoreInstagram has expanded its algorithm personalization features to its main feed.
Read MoreThe UK's communications regulator has reminded social media platforms they have a duty to minimize hateful content, not encourage it.
Read MoreWe dive into our initial thoughts on Siri AI and Tim Cook's legacy.
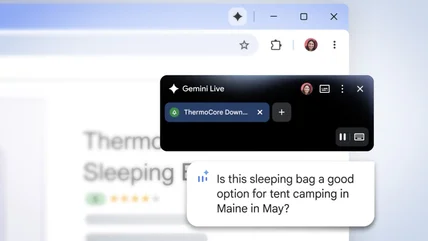
Read MoreGemini in Chrome continues to roll out and has now landed in Latin America, the Middle East and Africa.
Read MoreMicrosoft Office 2019 for Mac will effectively become useless next month.
Read MoreIf you've ever needed iPad data for a day or two without signing a contract or paying for an entire month, AT&T has a new option.
Read MoreIt’s actually a security feature.
Read MoreInsta360 has launched its first gimbal camera, the $770 Luna Ultra.
Read MoreWaymo made a virtual driver called ReD to help its robotaxis avoid accidents.
Read MoreYou now can get a US phone number with NordVPN’s Saily eSIM app.
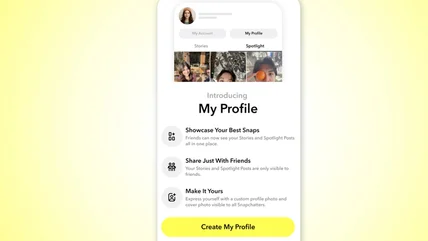
Read MoreMaybe it wasn't a great idea to let 14-year-olds post videos to Spotlight in the first place.
Read MoreThe Seattle City Council has approved a moratorium on the construction of large data centers.
Read MoreAt long last, a corporate training you might actually enjoy.
Read MoreThe rules may pose a minor hurdle for people who just have to cheat.
Read MoreEVs from GM will soon be able to top up at more kinds of public chargers.
Read MoreClaude subscribers can try the model until June 22 without spending usage credits.
Read MoreOpera's new Android update includes a soccer hub in time for the World Cup.
Read MoreMarshall's Stockwell III portable speaker runs 40 hours on a charge and costs $250.
Read MoreNASA has announced the crew of its critical Artemis III.
Read MoreA podcast and streaming ready microphone for all skill levels, and yes, it has RGB.
Read MoreWill Siri AI actually be useful, or is it more AI marketing fluff? We chat about that, and everything else Apple announced at its WWDC 2026 keynote, on the Engadget Podcast.
Read MoreBeta versions of iOS, iPadOS and watchOS are available to download if you have a developer account.
Read MoreIt's not perfect, but Rivian's latest shows this company is playing for keeps.
Read MoreThe Defense Department has released an updating list of companies linked to the Chinese military, and it now includes Alibaba and Baidu.
Read MoreThe FCC has given Amazon an extension to a key milestone for its Leo satellite internet deployment.
Read More